
Motorized Linear & Rotation Stages

Micro-Motion
Holmarc offers a wide range of high-precision micro positioning devices and systems. Micro-Motion along with a combination of one or more of the MTS, LTMS or MTTS series motorized stages make a high accuracy positioning system for research and industrial applications. The option for selecting any of the various models of motorized translation stages makes it easy to develop a complete position control system involving any or all of the three linear or rotational axes.
Holmarc stepper motor controller has microstep drives offering microstepping down to 16 microsteps per step. Usually stepper motor has 200 steps per revolution. We can increase step per revolution by using drives which can divide a single step in to 16 microstep. This allows much higher resolution up to 3200 micro steps per revolution.
Micro-Motion unit also supports encoder feedback. A built in algorithm counts the incoming pulses from the encoder and compares it with the commanded number of steps to verify the accuracy of movement.

Features
In built motor drives
PWM current control
1 A to 5A Stepper drive
Up to 1 / 256 micro step
Microprocessor controlled
Power down mode
Position & speed control
Acceleration / deceleration
Trigger I / O
In-built power supply
Software for PC based operation
Serial port (RS232C) connectivity
Optional USB to serial converter
Optional wireless connectivity (Bluetooth)
Multi Axis Positioning
Holmarc provides positioning controllers up to 6 axes for all motion applications, individually programmable for stepper motor driven stages. Multi axis position controller is recommended for a wide variety of both simple and complex motion applications.
| Microstep Configuration | Micro steps per revolution |
| 1 / 2 | 400 |
| 1 / 4 | 800 |
| 1 / 16 | 3200 |
Customized Motion Control and Data Acquisition Systems
Holmarc also provides custom motion controllers with graphics LCD and micro switch keyboard which facilitates stand alone operation with a wide range of functions, without interfacing to a PC. The user interface in these systems can be developed according to specific application. Hence, the user is freed from meddling with unwanted features. The short learning curve also allows the user to dedicate more time on actual task.
We will help you to develop a complete system for your motion control and data acquisition application using Holmarc's wide range of standard and custom products. Any third party instruments which have commonly used hardware or software interfaces like RS232, GPIB, DCOM etc can be use with the system.
Handheld Motion Control System
Hand-held stepper motor controller-driver offers up to 4 axes control for actuators, linear stages and rotation stages. The hand held unit features 16X micro stepping ratio for smooth, high resolution positioning. Two primary control modes are available, manual control and computer control.
To drive the stage using a PC, a command set will be provided to communicate with the controller using LabVIEW or any other programming language through RS 232 port.

Software (Micro-Motion)
Micro-Motion, a software developed by Holmarc is an easy to use package to drive all Holmarc made positioning stages. It allows the user to operate the system in two modes, namely Manual and Programmable.
The Micro-Motion software has a very short learning curve. According to the application requirements, the stages can be operated at different speeds and motion profiles.It incorporates facility to provide delay in between the movements to perform other tasks, trigger external devices or circuits and get itself triggered by an external trigger source. The software enables the user to program each movement of the stage in the form of the following commands executed sequentially.
Commands
Manual Mode
There are 4 buttons in the Manual mode region of the dialog window, the functions of which are explained below.
| > | : | Move the stage one step towards far-end. |
| < | : | Move the stage one step towards home |
| >> | : | Move the stage continuously towards far-end. Click again to stop the movement. |
| << | : | Move the stage continuously towards home. Click again to stop the movement. |
| Home | : | Move the stage towards home. Click again to stop the movement. |
| Reset | : | Click this button to reset the position display to zero. |
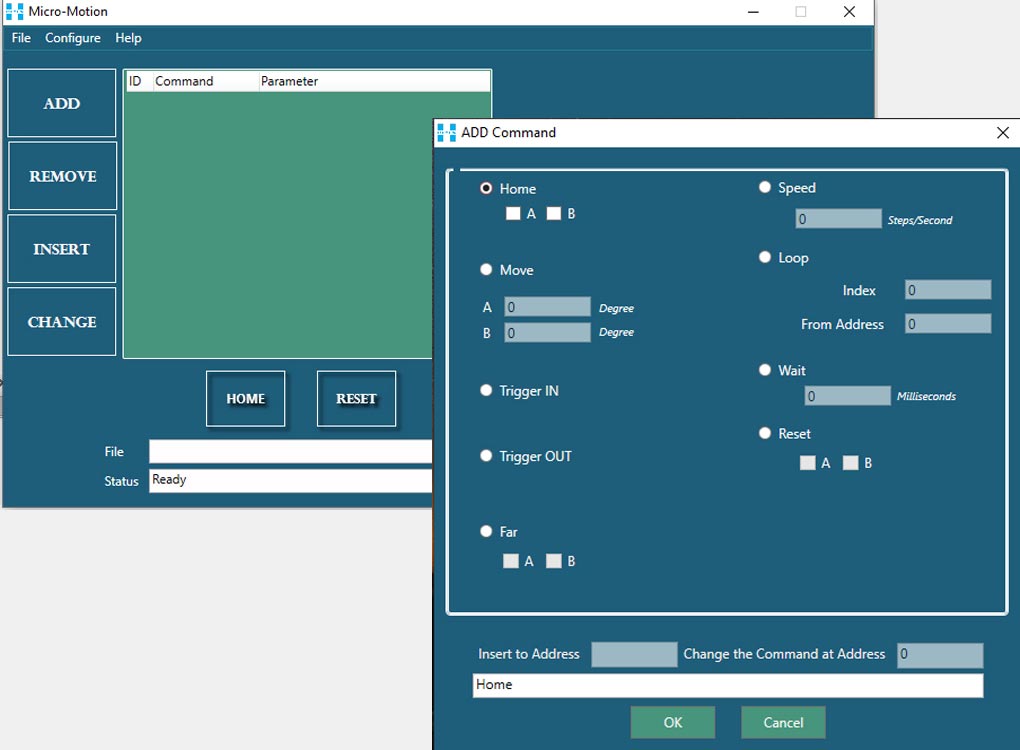
Programmable mode
This mode enables the user to write a program, containing instructions to move different stages simultaneously, set the speed, incorporate delays and loop a set of instructions, execute that program and save it for later use.
| Home W | : | Moves the stage of the axis specified towards home. |
| Move [Displacement] | : | Moves the stage for the specified displacement. Wait Incorporates a delay. |
| Speed | : | Set the speed. |
| Trigger IN | : | The program waits for an external trigger which is a TTL pulse applied through the Trigger Input on the front panel of the controller. |
| Trigger OUT | : | The controller output a trigger which is a TTL pulse. |
| Loop [index, address] | : | The program loops index times from the address specified. |
| Goto address | : | The program jumps to the address specified. |
| Reset W | : | Resets the position display of the axis specified to zero. |
Micro-Motion
| Model Number | Motor Type | Number of Axis |
| HO-MPC-ST-01 | Stepper | 1 |
| HO-MPC-ST-02 | Stepper | 2 |
| HO-MPC-ST-03 | Stepper | 3 |
| HO-MPC-ST-04 | Stepper | 4 |
| HO-MPC-ST-05 | Stepper | 5 |
| HO-MPC-ST-06 | Stepper | 6 |
| Model Number | Motor Type | Number of Axis |
| HO-MPC-SV-01 | Servo | 1 |
| HO-MPC-SV-02 | Servo | 2 |
| HO-MPC-SV-03 | Servo | 3 |
| HO-MPC-SV-04 | Servo | 4 |
| HO-MPC-SV-05 | Servo | 5 |
| HO-MPC-SV-06 | Servo | 6 |
Customized Motion Control & Data Acquisition Applications
Measurement of spatial distribution of
Magnetic field strength of medium and large sized electromagnets.
Microwave and RF signal intensity of antennae.
Optical intensity of scattered, reflected or transmitted light in optical systems.
Multi-dimensional position control of the following
Mirror mounts, polarizers and light sources in optical systems.
Samples in nonlinear optics experiments.
Sensors and other components inside vacuum chambers and glove boxes.
High power laser head for laser cutting applications.
Spindles for marking and engraving applications.
Nanofiber Electrospinning targets for weaving of nanofibers.
Applications
Material Science
We manufacture customized systems for motion control and positioning applications in various scientific and industrial fields.
We assist our clients in finding efficient technical solutions for position and motion control.
Fore more details, please drop a mail to sales@holmarc.com
Established in 1993, Holmarc Opto-Mechatronics Ltd manufactures variety of scientific and engineering instruments for research, industry and education.
ISO 9001:2015 Made in INDIA
CIN : L33125KL1993PLC006984
GST No : 32AAACH9492C1ZQ
Navigation
Get in Touch
B.7., H.M.T. Industrial Estate
H.M.T. P.O, Kalamassery, Kochi
Kerala, India - 683 503
+91 920-719-7772 / 6 / 1
sales@holmarc.com
Mon - Sat : 9 am to 5 pm
Investor Zone # Online Dispute Resolution